 In the spring of 2013 a chance conversation with Alan Hubbard who at the time was working for what was then IBERS (everything changes) produced the idea that it might be possible to use inexpensive UAV technology based on 'hobby' radio control hardware, to capture images of Greenland glaciers for the purpose of building digital elevation maps and other types of analysis glaciologists are interested in.
I have both an interest in embedded systems and software as well as being a long standing model aircraft (fixed and rotary wing) pilot and was looking for an excuse to investigate the open source ArduPilot project I'd noticed was maturing nicely during 2012/13.
In the spring of 2013 a chance conversation with Alan Hubbard who at the time was working for what was then IBERS (everything changes) produced the idea that it might be possible to use inexpensive UAV technology based on 'hobby' radio control hardware, to capture images of Greenland glaciers for the purpose of building digital elevation maps and other types of analysis glaciologists are interested in.
I have both an interest in embedded systems and software as well as being a long standing model aircraft (fixed and rotary wing) pilot and was looking for an excuse to investigate the open source ArduPilot project I'd noticed was maturing nicely during 2012/13.
Aims
The aim was to create a UAV that could fly the 7km along a glacier front plus a couple of Km from the launch site. The current version can actually cover around 60Km and fly for about an hour (in light winds) 45Km is allows for a safety margin with cross winds of up to 25Kph.
Design Overview
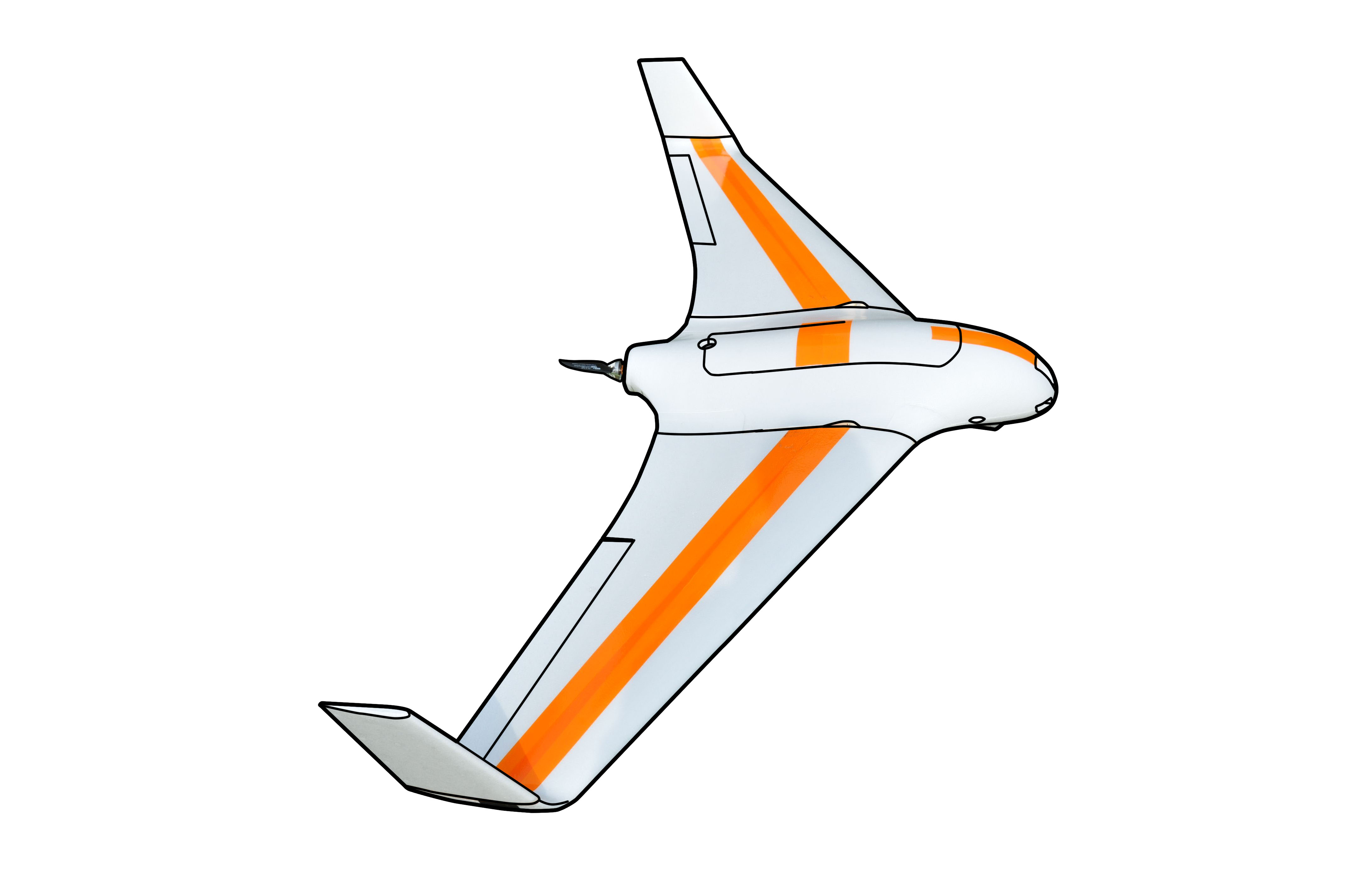
The Skywalker X8 airframe is ideal for the application because it is large enough to allow for a decent quality camera (I have flown 1Kg payload), and has a large fuselage to accommodate the electronics and payload. It is constructed from EPP foam which makes it fairly robust and easy to repair. Hand launch is easy and it can be landed on grass or (in our case a shingle beach). A number of modifications have been made to improve durability and are discussed in more detail on subpages. Standard radio control equipment, electric brushless motor, and LiPo batteries are used with the "Ardupilot 2.5" Arduino based open source Autopilot used for flight stabilisation and autonomous navigation
Performance
The UAV cruises at around 55Kph with an endurance or around 60Km carrying 700g of camera equipment.
Below is an basic composite image of the sea defenses at Borth, Ceredigion, UK created as a montage of frames taken from an early test flight video.

(click on image to view full size in new window)
Missions
The prototype (pictured above) was constructed and tested between March and May 2013 and two new UAVs were then constructed and taken to Greenland in Mid July. A number of missions have now been completed and some of the data processed - watch this space.