
Select the below heading to reveal the challenge map, programming details and extension activity for your chosen software.
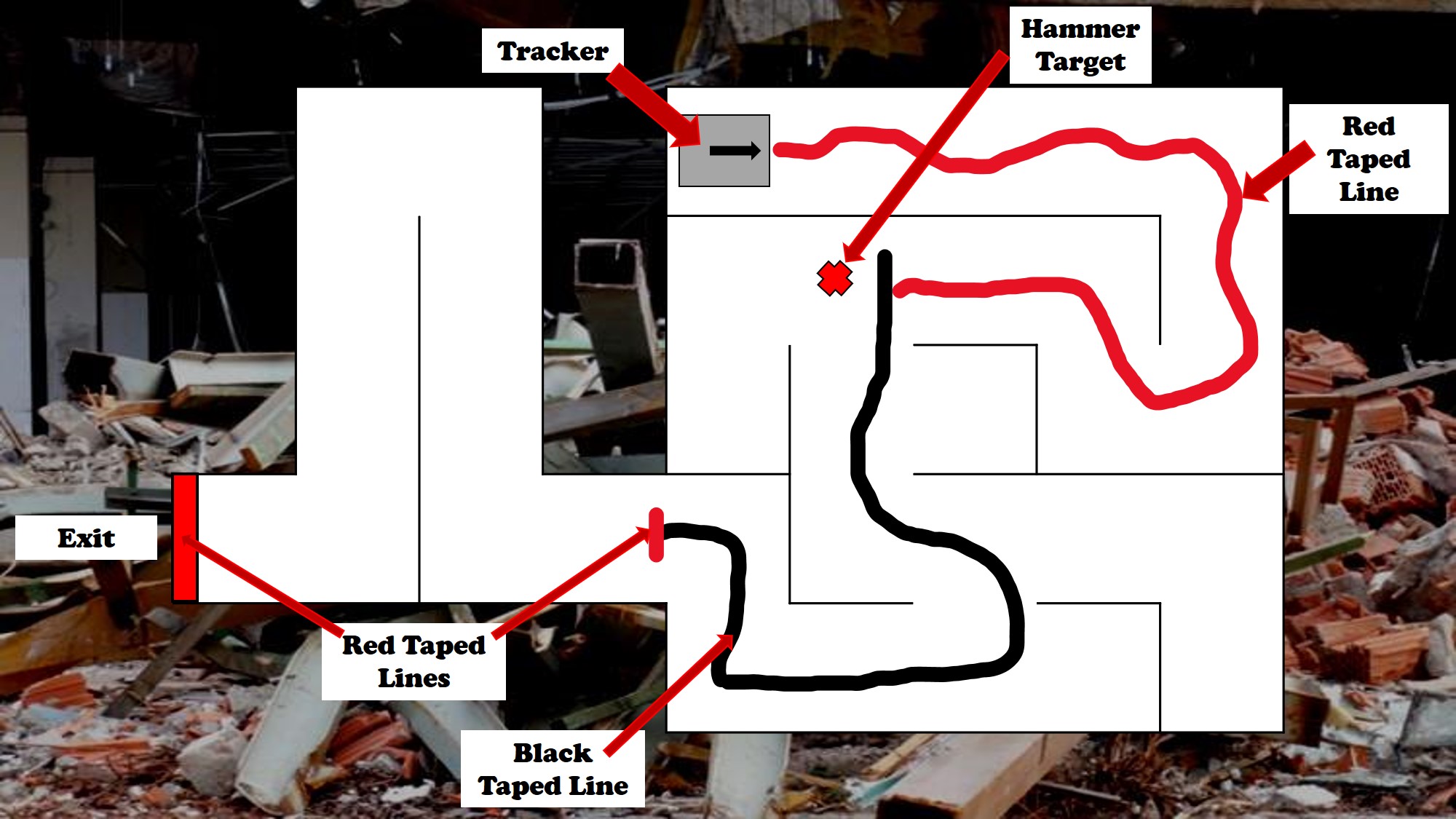
The Challenge: To navigate the Tracker unit to the hammer target, activate the hammer, then move on the end location.
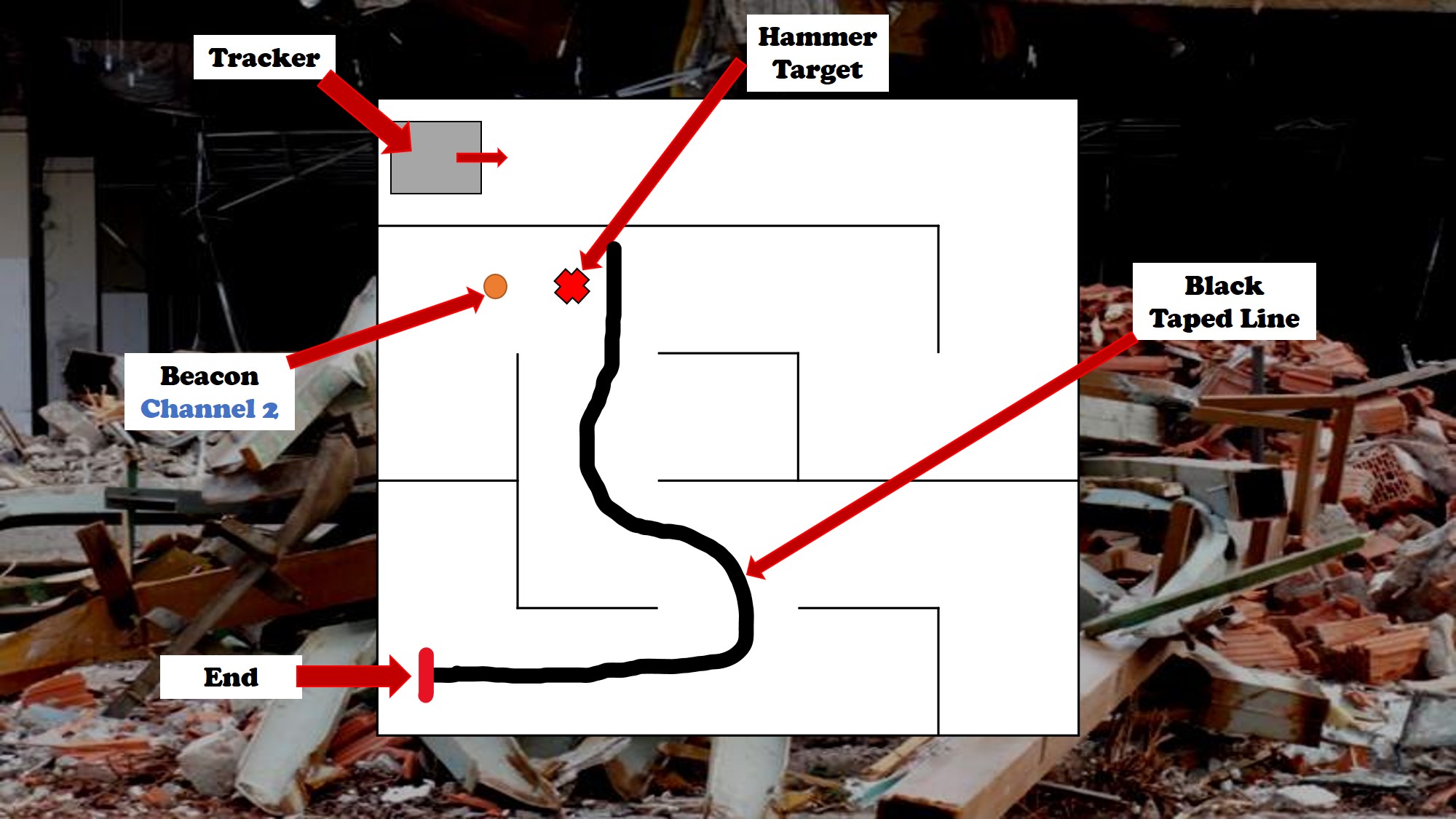
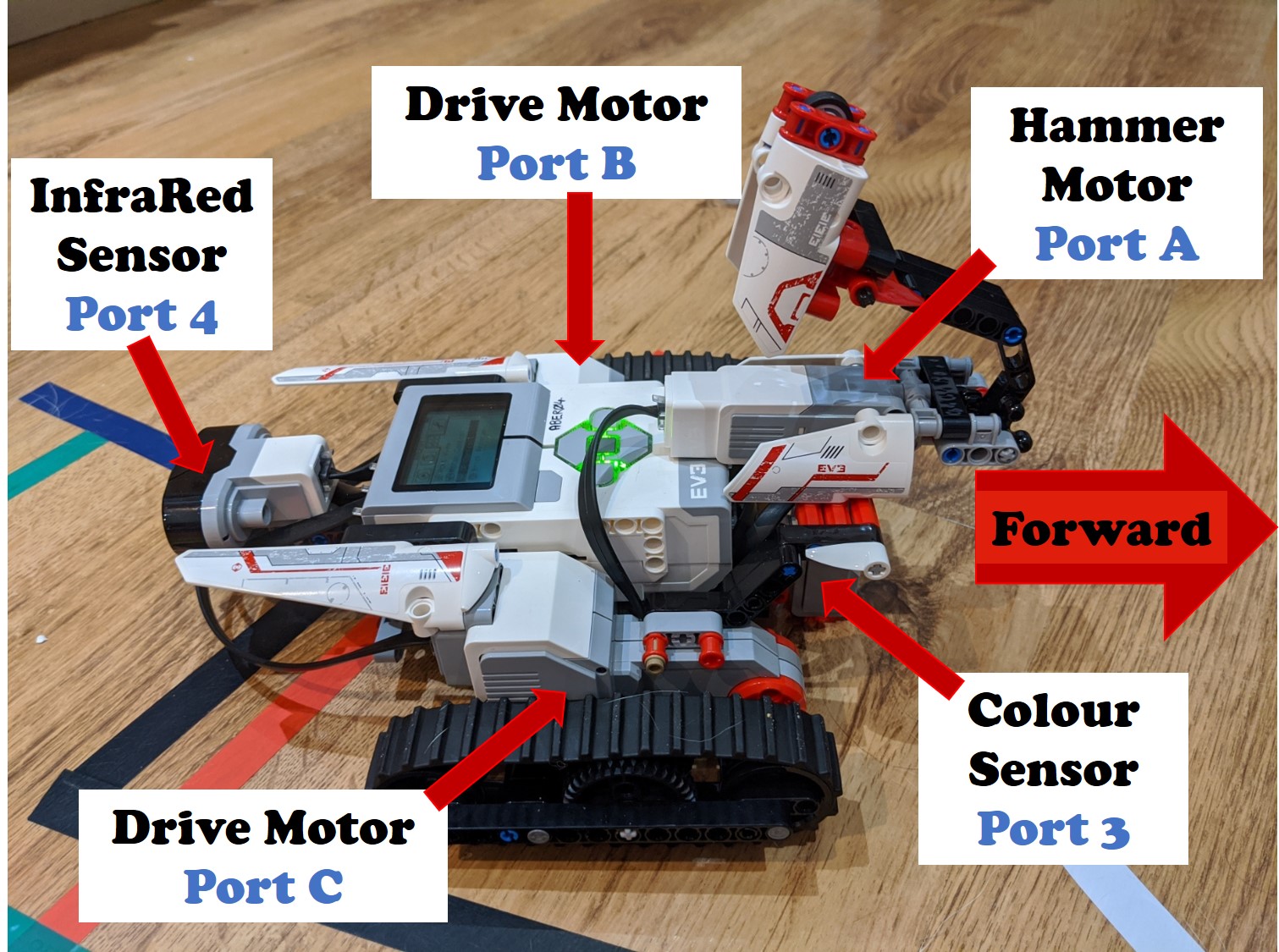
Below are the figures to assist in this challenge for the Tracker unit.
| Action | Left motor power | Right motor power | Number of rotations | Threshold value |
|---|---|---|---|---|
| To travel forward one grid square*1 | 100% | 100% | 4 | n/a |
| 90° turn right | 50% | -50% | 1.4 | n/a |
| Wall detection | n/a | n/a | n/a | <10 |
| Beacon detection*2 | n/a | n/a | n/a | <70 |
*1 The maze is made on a 5x5 square grid
*2When traveling forwards
Hammer Controls: The hammer is activated with the 'Medium Motor'. To drop the hammer, you will need only 0.5 rotations at 50% speed. To lift it back into position it's 0.5 rotations at -50% speed. Do NOT exceed these figures as it could lead to damaging the robot, freezing the program or injuring the user.
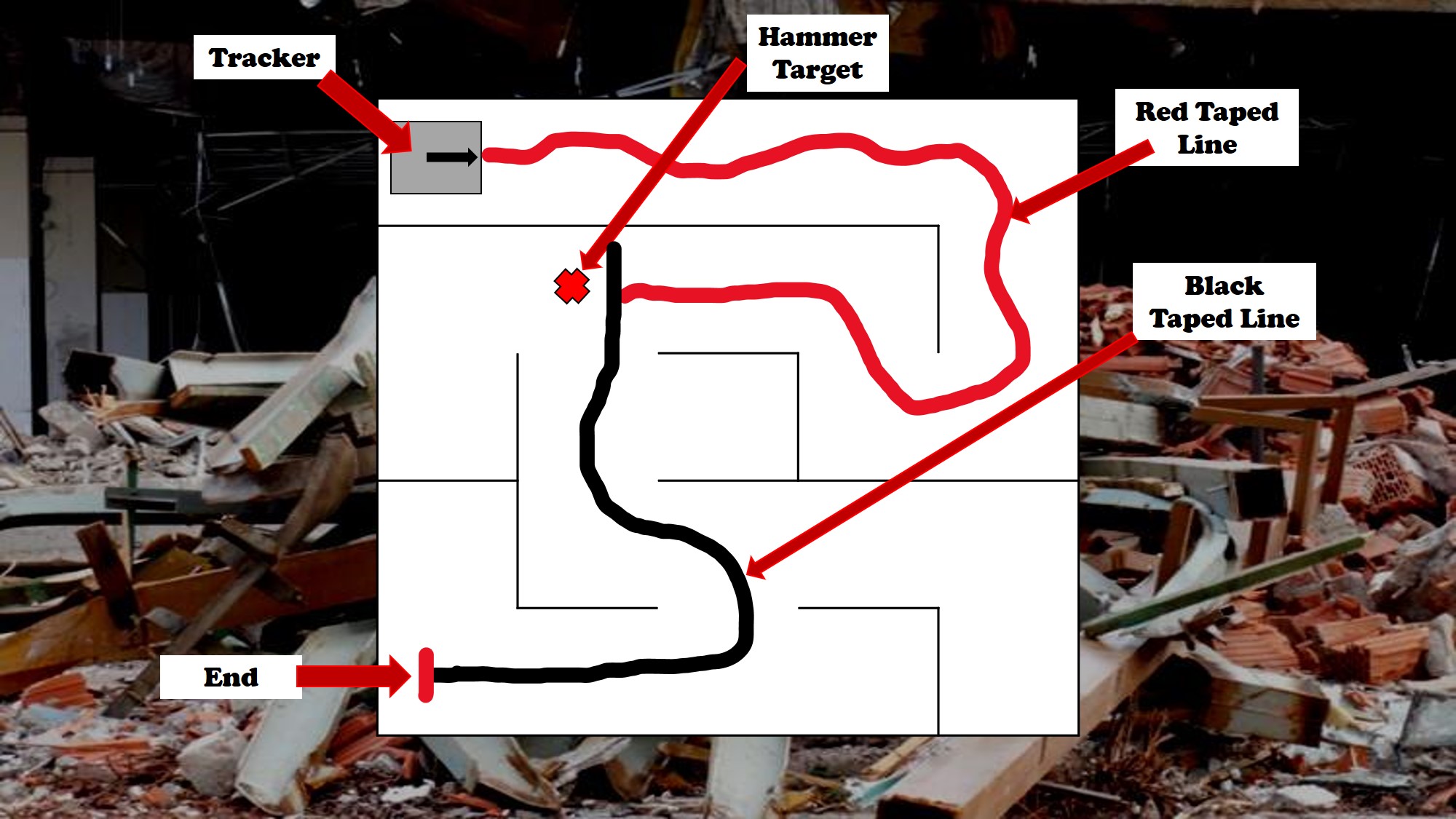
How would you need to alter your program to complete the below additions?
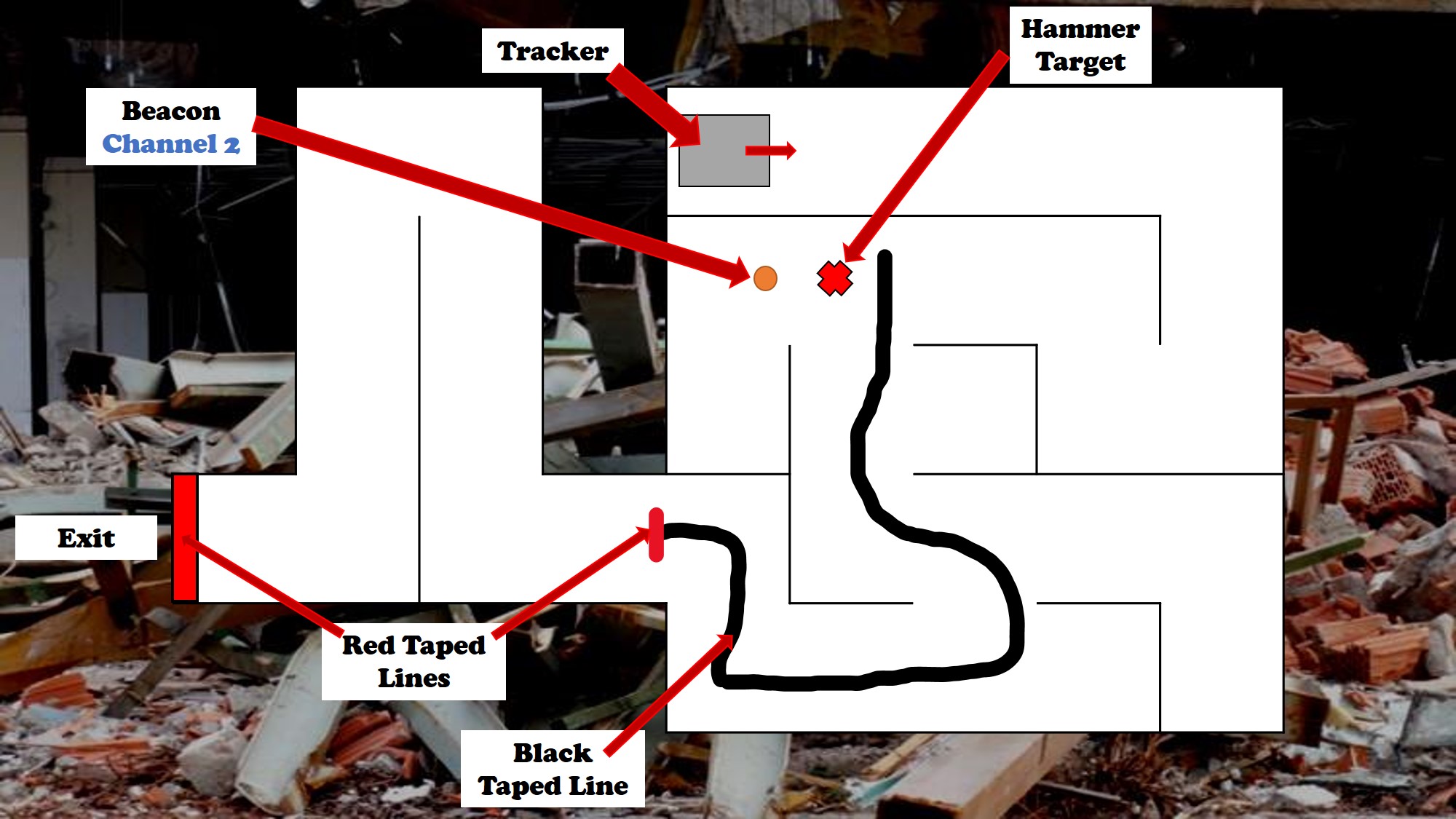
The Challenge: To navigate the Tracker unit to the hammer target, activate the hammer, then move on the end location.
Below are the figures to assist in this challenge for the Tracker unit.
| Action | Left motor power | Right motor power | Number of rotations | Threshold value |
|---|---|---|---|---|
| To travel forward one grid square*1 | 100% | 100% | 4 | n/a |
| 90° turn right | 50% | -50% | 1.4 | n/a |
| Wall detection | n/a | n/a | n/a | <10 |
*1 The maze is made on a 5x5 square grid
Hammer Controls: The hammer is activated with the 'Medium Motor'. To drop the hammer, you will need only 0.5 rotations at 50% speed. To lift it back into position it's 0.5 rotations at -50% speed. Do NOT exceed these figures as it could lead to damaging the robot, freezing the program or injuring the user.
How would you need to alter your program to complete the below additions?
Members of the Aberystwyth Robotics Club can share a link to their MakeCode program or send a Lego Mindstorms program directly through the club's Discord server.
Non-members who wish to see if their program works can email nar25@aber.ac.uk either the Lego Mindstorms file or a link to their MakeCode program