
Being a walking robot, Antsy requires a little pre-programming to ensure the legs are calibrated to be in opposite positions.
Here is the leg calibration information (pdf), if you're interested in how it works.
No need to include this in any program you provide, as the robot calibration will be run before each test by us.
Throughout the programming of Antsy you need to remember to always turn both leg motors equal amounts, including when turning. This means when turning right, you need the left motor to move the same amount backwards as the right is moving forwards. Failure to do so could lead to the robot toppling over.
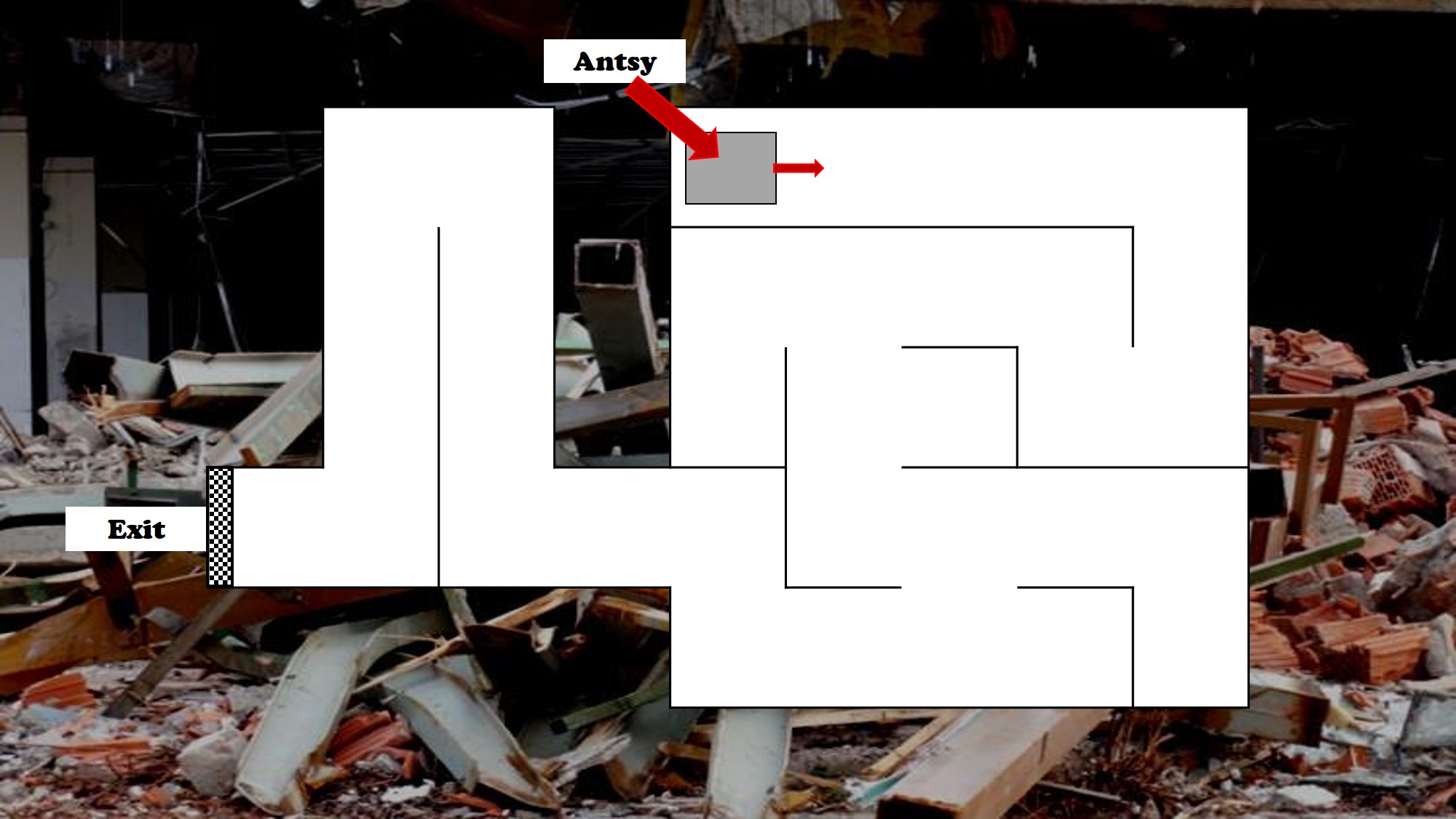
Click on the below heading to reveal the challenge map for Antsy - this is achievable using either software option.
The Challenge: Antsy needs to navigate her way to the exit
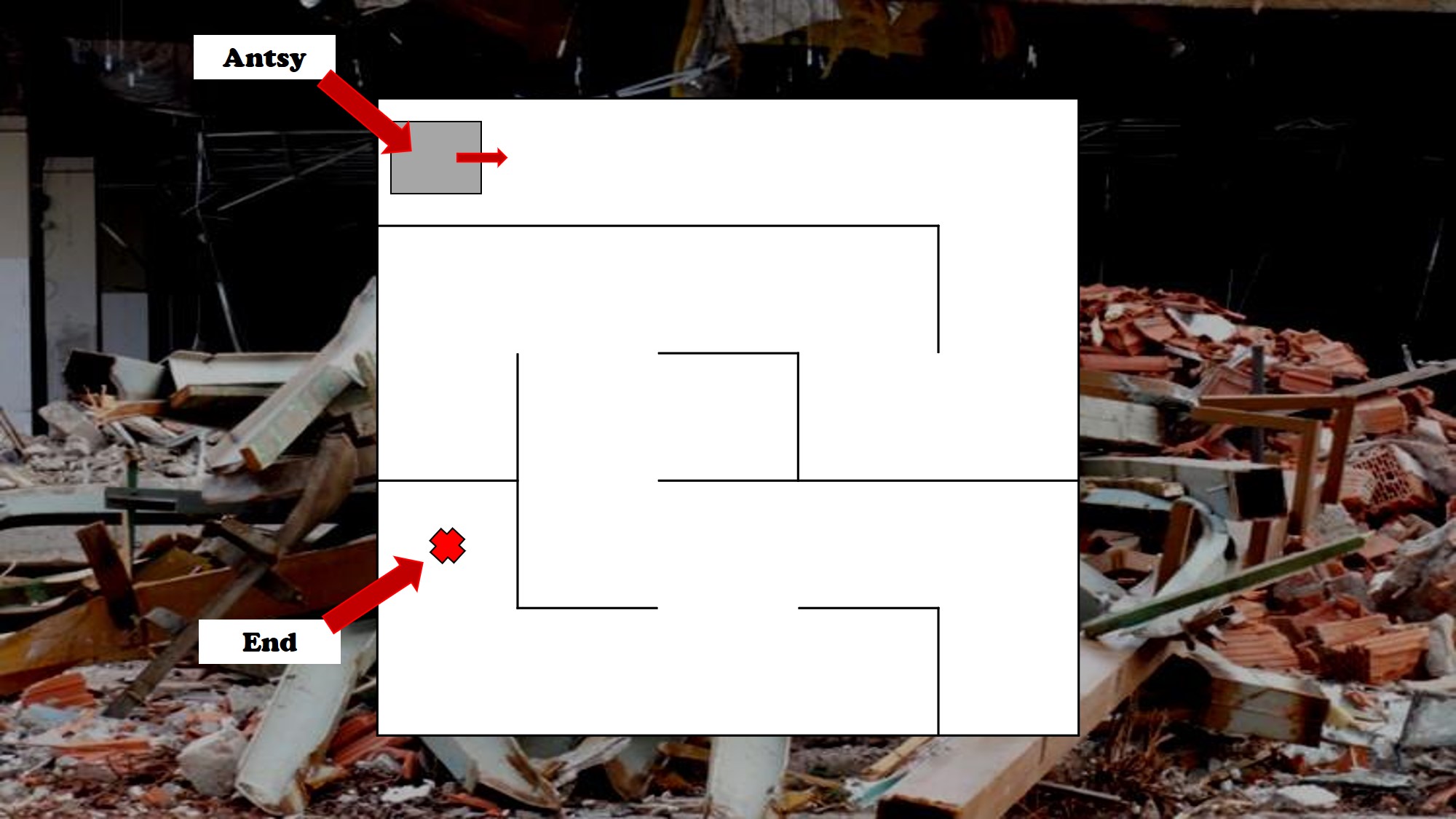
Warning! The ceiling is unstable. If red light on, Antsy needs to stop and wait, yellow means move slowly, green means safe to proceed, the exit is lit in blue to terminate program.
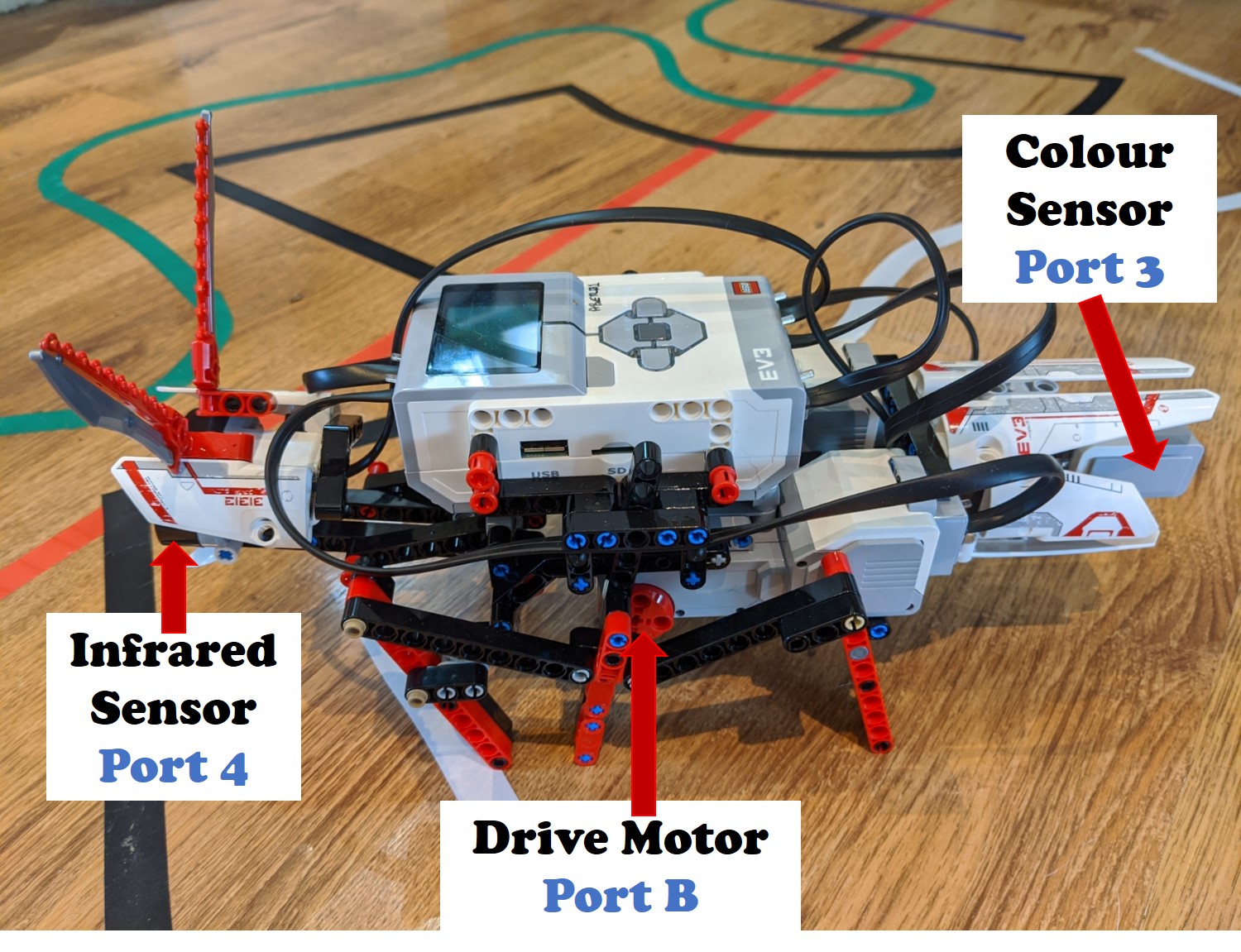
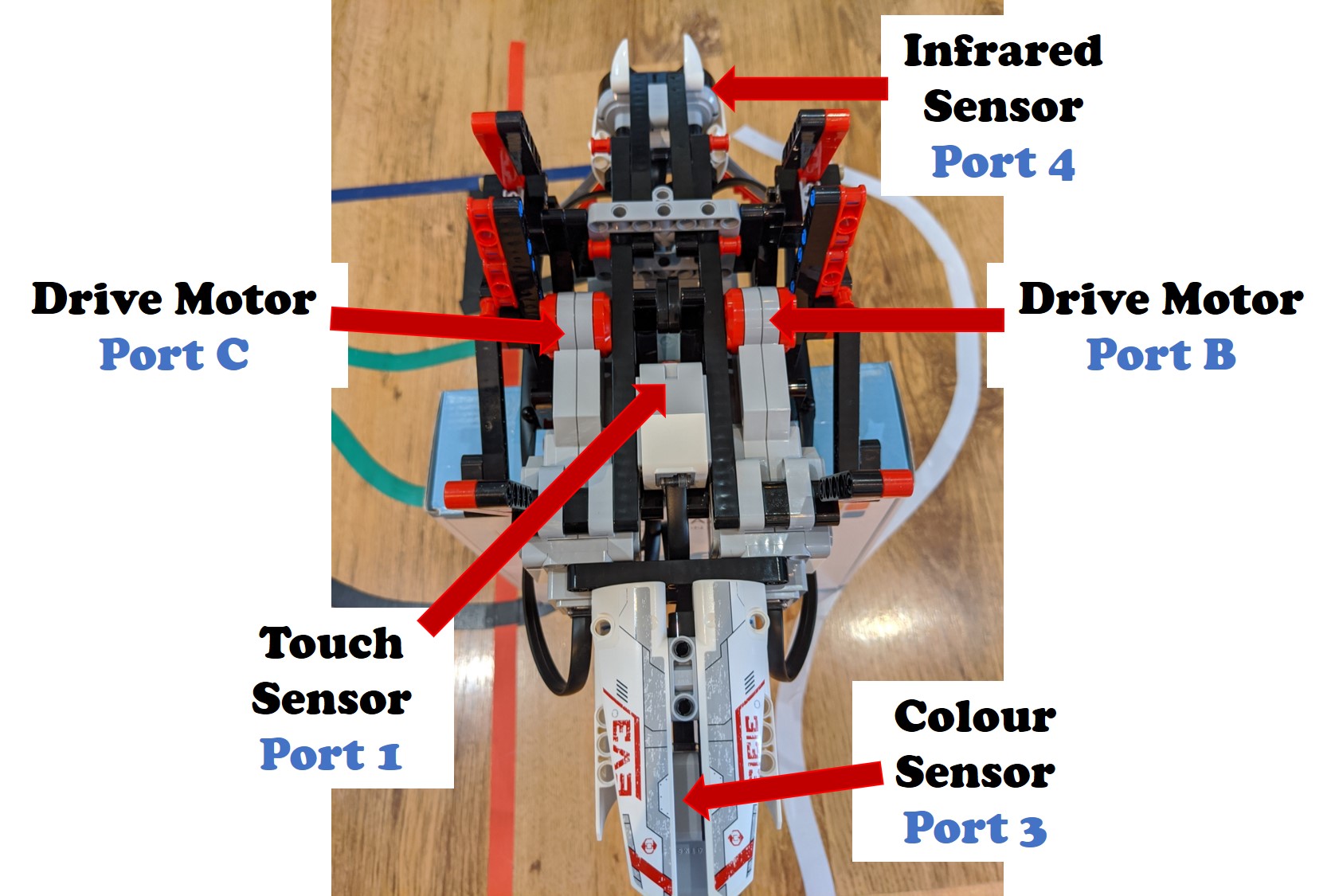
Below are the figures to assist in this challenge for the Antsy unit.
| Action | Left motor power | Right motor power | Number of rotations | Threshold value |
|---|---|---|---|---|
| To travel forward one grid square*1 | 100% | 100% | 5 | n/a |
| 90° turn right | 50% | -50% | 3.5 | n/a |
| Wall detection | n/a | n/a | n/a | <10 |
These are not perfect, as the legs do not have much grip on the maze floor surface.
This means you may want to consider a strategy that will counter this issue.
*1 The maze is made on a 5x5 square grid
Would your program need to be altered to reach the finish line on this new map? Why? If so, then how?
Members of the Aberystwyth Robotics Club can share a link to their MakeCode program or send a Lego Mindstorms program directly through the club's Discord server.
Non-members who wish to see if their program works can email nar25@aber.ac.uk either the Lego Mindstorms file or a link to their MakeCode program