Blodwen
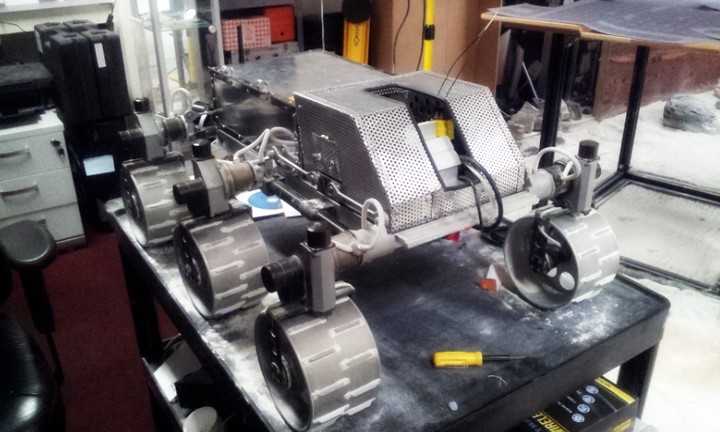
Blodwen was built during my industrial year. It’s a small Mars rover, with a wheel model similar to that which is being used in the ExoMars rover.
I used Blodwen in my final year project into “walking” as a possible locomotion method. Here’s a video of it in action on our Mars terrain:
Hardware
The chassis and motors came pre-built from a Russian company, but were controlled via a box of switches on the end of a tether. My work involved designing a proper control system. There are six wheels, each with three motors:
- a drive motor to turn the wheel;
- a steer motor to rotate the wheel around its vertical axis;
- a lift motor to rotate the wheel’s “leg.” Normally this is only used in stowing and deploying the rover, but my final year project investigated whether this was useful in locomotion.
We therefore need to control 18 motors, which is difficult. I eventually decided to use off-the-shelf motor controller components connected by an I2C bus. The design chosen consists of:
- An onboard PC connected via USB serial to…
- an Arduino Uno inside the chassis acting as an I2C master connected to…
- three daughterboards, each holding…
- three ATMega328-based motor controllers, each of which drives…
- two motors (and optionally reads a chassis pose potentiometer).
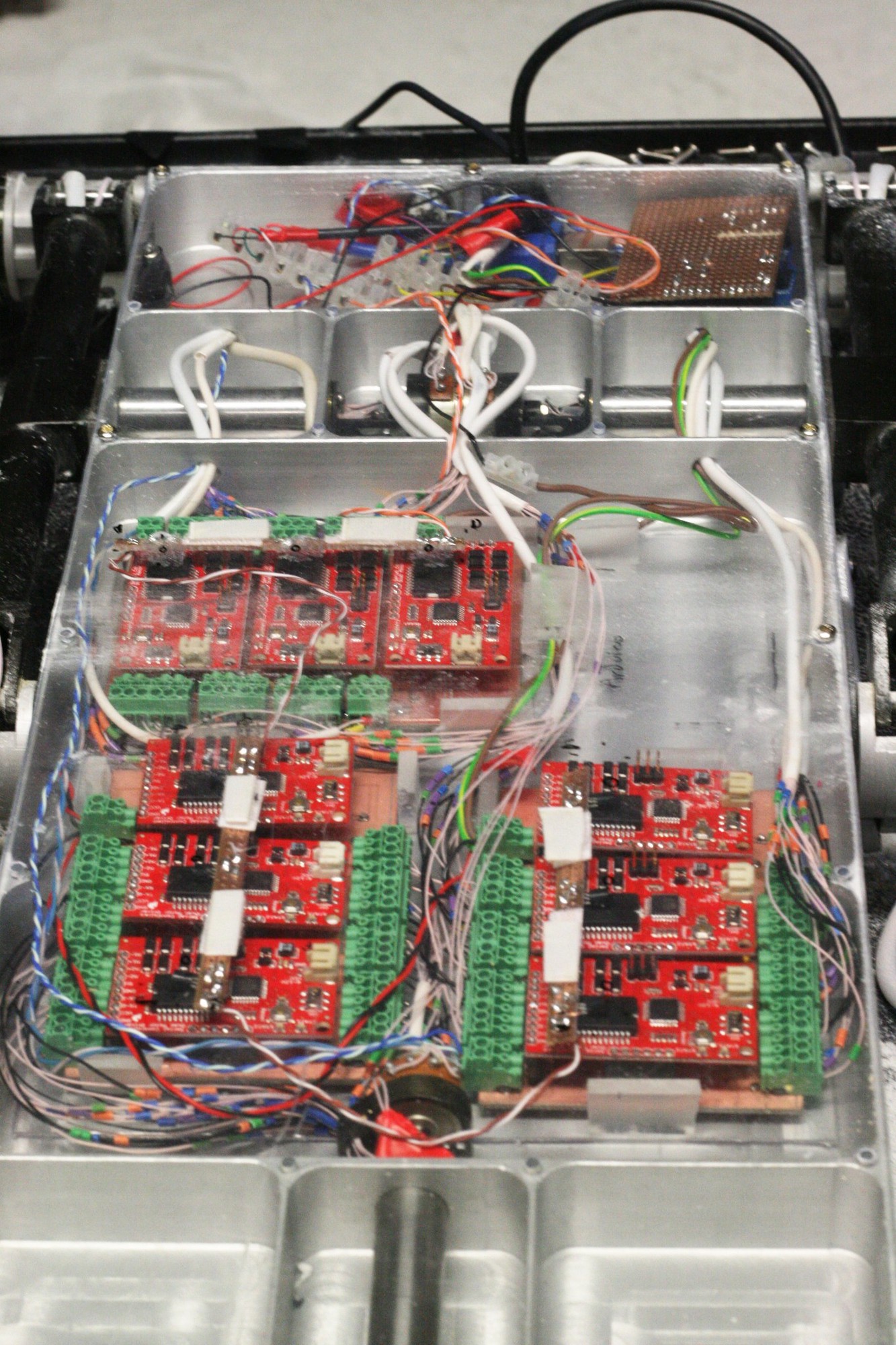
Here’s what the control system looked like:
Software
Blodwen is controlled via a C++ library on the on-board PC, which communicates with the Arduino. It’s fairly straightforward:
int main(int argc,char *argv[]){
Rover r;
try {
// set up the rover given the comms port and the
// baud rate.
r.init("/dev/ttyACM0",115200);
// send default calibration
r.calibrate();
// some parameter data we're going to change;
// you probably won't do this - it's just an illustration.
MotorParams params = {
0.004,0,0, //Proportional, Integral, Differential gains
0,0, //integral cap and decay
300, //overcurrent threshold
};
// change parameters on the drive motors
// and set a speed for them
for(int i=1;i<=6;i++) { // motors are 1 to 6 as in the documentation
Motor *m = r.getDrive(i); // get each drive motor
// get a pointer to its parameters
MotorParams *p = m->getParams();
// copy some other data into them
*p = params;
// and send the changes
m->sendParams();
// and set a speed
m->setRequired(1000);
}
for(;;){
usleep(10000); // wait 1/100 s
r.update(); // update the rover
// get drive motor 1 data
DriveMotorData *d = r.getDriveData(1);
printf("%f\n",d->actual); // print actual speed
}
} catch(SlaveException e) {
// slave exceptions are thrown by protocol and comms errors
printf("Error in rover communication: %s\n",e.msg);
return 0;
}
}
James Finnis
Lecturer in Computer Science
Research interests: artificial neuroendocrine systems, unusual neural network architectures, autonomous off-road driving, image processing.