
|
|

|
|
 |
| Figure 1 |
|
| Figure 2 |
In the framework of the NSERC-Noranda Industrial Chair in Mining Automation (held by my advisor), we have applied GNOME to the modeling of underground mines, in order to provide useful information for the navigation of autonomous mining vehicles, which is an important part of mining automation. Several mine models have been reported that represent various attributes (topography, geology, hydrography, ore grade, etc.), but these attributes are either not useful for navigation or they are under an inappropriate form for our task (block or CAD models; block models decompose the space in cells each indicating the presence or absence in the corresponding volume of what is represented while CAD models represent volumes by their boundaries).
We have thus developed an underground mine model to study navigation problems such as autonomous navigation or path planning and learning. Moreover, mine representations following our model are being used to build virtual mines, within which a vehicle can navigate and take measurements of its environment.
The next section will describe the mine model, while this section briefly describes virtual mines as well as examples of their utilization. Finally, this section shows how we use surveying data to build mine representations.
The attributes actually represented in the model are the mine's geometry, the roughness of walls, rock types, lighting, and obstacles. The purpose of geometry and obstacles is clear. Roughness of walls and rock types can be used to predict noise levels of sensors measuring the environment. Lighting can be used to, e.g., plan paths everywhere lighted. Other attributes such as vehicle traffic could be added if the application of interest was, for example, traffic management.
At the first level of the geometric decomposition tree, there is an attribute object called ``mine,'' which is decomposed into galleries, intersections, and rooms. The fact that navigation in galleries is different than navigation through intersections (or in rooms) justifies this decomposition. A gallery is decomposed into a sequence of gallery sections represented as clothoidal ribbons (which most accurately represent curved paths followed by a vehicle) which preserve continuity of orientation and curvature at their meeting points. Intersections and rooms are decomposed into walls, a ground and a ceiling. A complex intersection is first decomposed into more basic ones. A wall (of an intersection or of a room) is decomposed into a sequence of wall sections represented as cubic polynomial surfaces, with discontinuities at corners. Qualitative and quantitative connection relations between these various attribute-objects are represented.
Roughness is represented as a fractal dimension and a density of bumps. Rock is represented based on a classical geological taxonomy. Several types of light sources are included in the model: punctual, directional, and spotlights.
Some inter-attribute relations are represented, such as the association of roughness and rock type to gallery and wall sections, ceilings, and grounds, or the positioning of light sources and obstacles within the mine.
[LHC96c] gives the formalism associated to the mine model. [LHC96b] describes a preliminary version of the mine model as well as the virtual mines.
Based on the mine model, we have developed a program generating virtual environments from mine representations (using the Open Inventor library on a Silicon Graphics workstation)1. One utilization of virtual mines is to simulate a vehicle navigating in the mine and acquiring for the moment two types of data: photometric CCD camera images and profiles given by laser range-finders. For the latter, an important part of 3D modeling work was required: creating surfaces that represent roughness as spatial deviations (rather than just texture mapping), and ensuring that the connections between these rough surfaces are ``clean'', i.e. continuous.
The sensory data extracted from virtual mines is used for different research projects (obstacle detection and intersection recognition [Bér96]). Also, the virtual mines are used as environments for robotic exploration and surveying, or to learn trajectories based on sensory responses. Figure 1 shows views of such a virtual mine. Figure 2 shows a view of a VRML model of the geometric attribute of a simple mine.
|
|
|
|
|
|
|
| Figure 1 |
|
|
| Figure 2 |
An article describing the generation of these virtual mines have been submitted to Centennial Meeting of the Canadian Institute of Mining, Metallurgy and Petroleum/XVIth Congress of the Council of Mining and Metallurgical Institutions ([LDHC98]).
In order to use the mine model developed, we want to build mine representations based on this model. To build such a representation, we use surveying data, which can be provided by two types of surveying procedure. One is traditional surveying, in which a crew walks through the mine, makes measurements, and reports these measurements in field notes. The surveyors base themselves on practical knowledge to identify salient features of the mine where measurements are necessary. Measurements thus provided are generally sparse. The second procedure is automated surveying by an autonomous vehicle that explores the mine and acquires dense lateral and vertical range measurements along its path2.
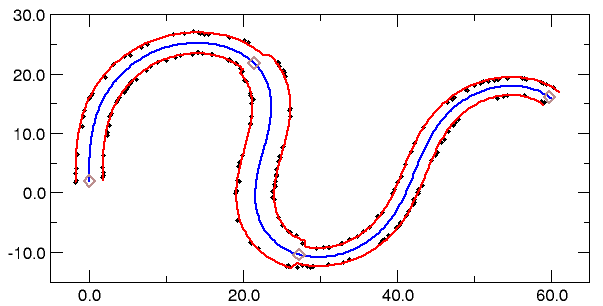
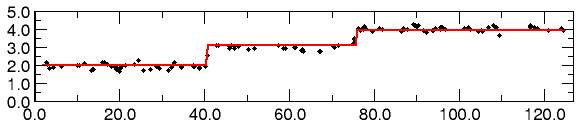
Regardless of the surveying procedure used, our reconstruction method fits gallery, intersection, or room models to the surveying data, minimizing a distance between models and data. Since the distance function can have numerous local minima (due to the continuity we impose between clothoidal ribbons, in the case of galleries), we use a simulated annealing procedure. Figure 3 shows an example of reconstructed gallery.
|
| The walls |
|
| The ceiling |
| Figure 3: An example of gallery reconstruction from dense data |
An article describing the mining aspects of this work has been submitted to the 7th Canadian Symposium on Mining Automation ([LHC97]). We have also submitted to SMC'97 an article describing details of the model-based reconstruction ([LHC97b]).
Go back to my home page.