
Dyma'r uned EV3 y byddwn yn ei defnyddio ar gyfer dysgu hanfodion rhaglennu.
Gallwch un ai dewis rhoi cynnig ar bob taith cyn edrych ar y datrysiad neu, os ydych yn ddigon hyderus eich bod yn deall, defnyddiwch nhw fel canllawiau rhaglennu yn unig.
Y datrysiadau symlaf sy'n cael eu nodi, felly, nid da lle gellir gwell - amdani!
Gan ddefnyddio'r moduron gyrru yn unig, lluniwch raglen i wneud i Johnny symud ymlaen ar hyd llinell syth.
Manylion Rhaglennu: Dylech sicrhau bod gosodiadau pŵer y moduron wedi'u gosod ar 100% ac mai am 5 eiliad yn unig y bydd y rhaglen yn rhedeg.
Y cam cyntaf wrth raglennu yw ystyried pa gamau i'w cymryd.
Yn yr achos hwn, un cam sydd - Troi'r ddau fodur ymlaen i bŵer o 100% am 5 eiliad


Ar ba gam y daw gwall dynol yn ystyriaeth yn y fan hon?
Allwch chi feddwl pam, o bosibl, na fydd y rhaglen hon yn cynhyrchu llinell berffaith syth gyda'r robot hwn (ac eithrio'r gwall dynol a grybwyllir uchod)?
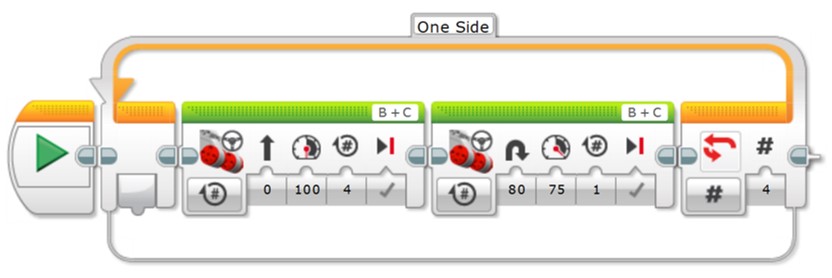
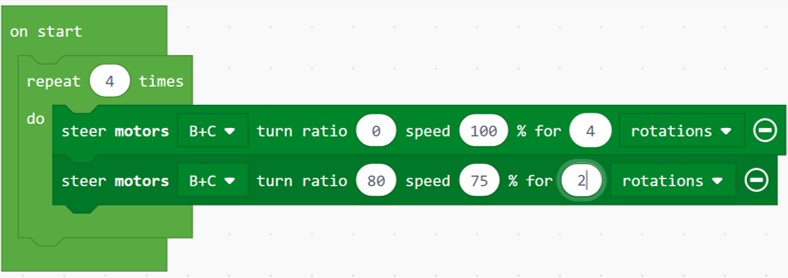
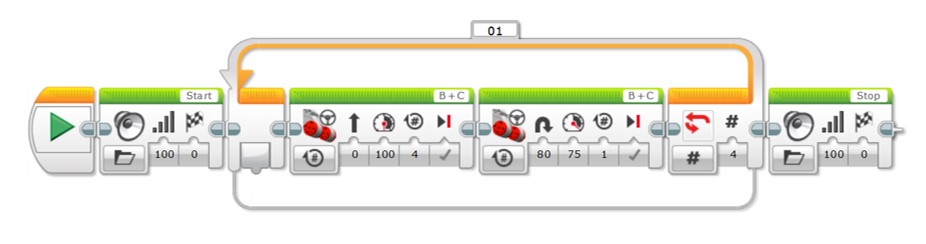
Gan ddefnyddio'r moduron gyrru yn unig, lluniwch raglen i wneud i Johnny symud mewn sgwâr a dychwelyd i'w fan cychwyn.
Manylion rhaglennu:
Symudwch ymlaen 4 troad
Trowch 90°
Symudwch ymlaen 4 troad
Trowch 90°
Symudwch ymlaen 4 troad
Trowch 90°
Symudwch ymlaen 4 troad
Trowch 90°
Fe welwch ein bod yn ailadrodd yr un dau gyfarwyddyd 4 gwaith sy'n golygu y gallem ni ddefnyddio dolen gan beri i'r ddau orchymyn hyn redeg bedair gwaith.
Yn eich barn chi, pam gallai gwerthoedd troi Johnny fod yn wahanol i werthoedd troi cynlluniau robotiaid eraill sy'n defnyddio'r un offer a'r un moduron?
Pe bawn ni'n rhedeg y rhaglen hon ar robot a gafodd ei adeiladu'n union yr un peth, ni fyddem yn gallu gwarantu y byddai'n gweithio. Pam?
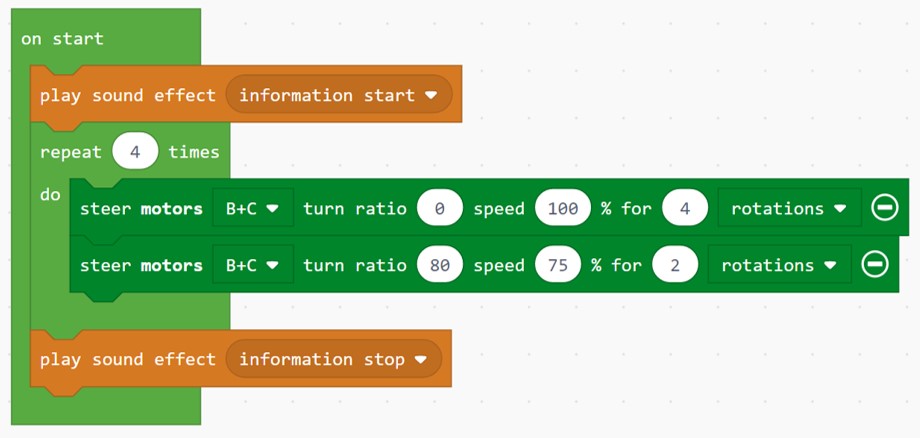
Beth am i ni ychwanegu effeithiau sain i nodi dechrau a diwedd y rhaglen a luniwyd yn Nhaith Dau.
Dewiswch yr effaith sain ar gyfer y dechrau
Mewnosodwch yr effaith sain ar ddechrau'r rhaglen
Dewiswch yr effaith sain ar gyfer y diwedd
Mewnosodwch yr effaith sain ar ddiwedd y rhaglen
Sut gallech chi ddefnyddio effeithiau sain neu ychwanegiadau eraill i'ch helpu i benderfynu a yw rhaglen yn gweithio'n gywir? Chwiliwch am gliwiau trwy edrych ar y mathau o seiniau sydd ar gael.
Noder - Nid yw hyn yn bosib eto gyda Meddalwedd Microsoft MakeCode.
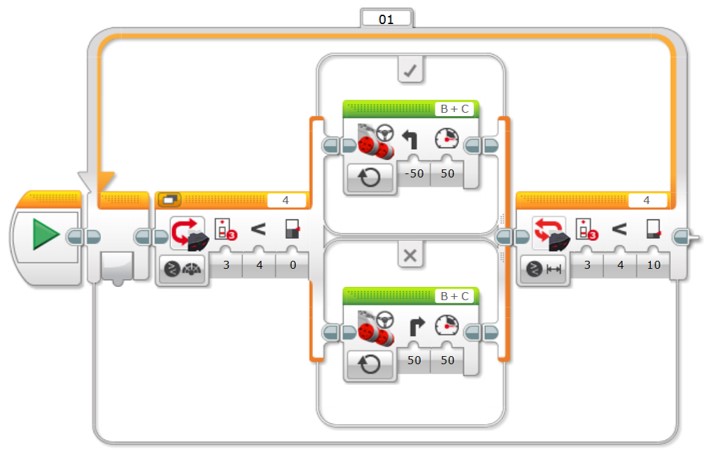
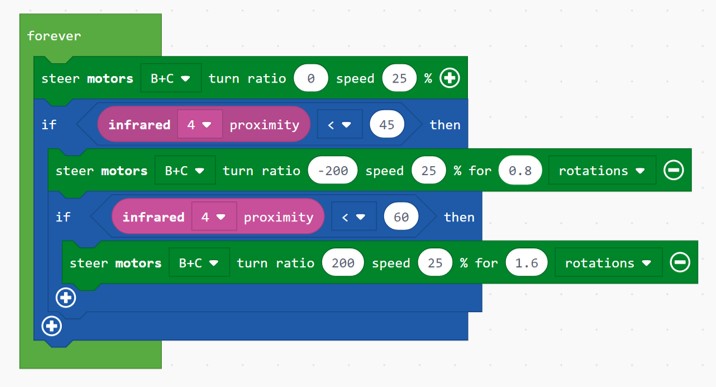
Rhaglennwch Johnny i ddod o hyd i ffagl Isgoch a symud tuag ati.
Manylion rhaglennu: Mae'r ffagl wedi'i gosod ar sianel 3 ac rydym yn dymuno i Johnny stopio yn union cyn iddo daro'r ffagl
Dewch o hyd i'r ffagl
Symudwch tuag ato
Stopiwch yn union cyn taro'r ffagl
Er mwyn helpu i benderfynu sut i osod yr elfennau canfod a symud, rhaid i ni ddysgu mwy am sut mae'r synhwyrydd Isgoch yn mesur cyfeiriad y ffagl.
Mae gwerthoedd cyfeiriad y ffagl rhwng -25 (chwith) a 25 (dde).
Ond y broblem yw y gallai'r holl werthoedd rhyngddyn nhw gyfeirio at du blaen neu du ôl y synhwyrydd.
Daw'r llun o 'The Lego Mindstorms EV3 Discovery Book' gan Laurens Valk
Felly, os yw gwerth cyfeiriad y ffagl yn negatif, mae'n rhaid i'r robot droi i'r chwith, ond os yw'r gwerth yn bositif, mae'n rhaid iddo droi i'r dde.
Pam na allwn ni'n syml osod y switsh i 'os 0 symudwch ymlaen, os na, trowch'?
Beth fyddai wedi digwydd pe na byddem yn gorchymyn Johnny i stopio wrth ymyl y ffagl?
Wrth edrych ar y ffordd mae Johnny wedi cael ei adeiladu, pam na allwn ni ddefnyddio gwerth trothwy rhwng 0 a 5 ar gyfer stopio?
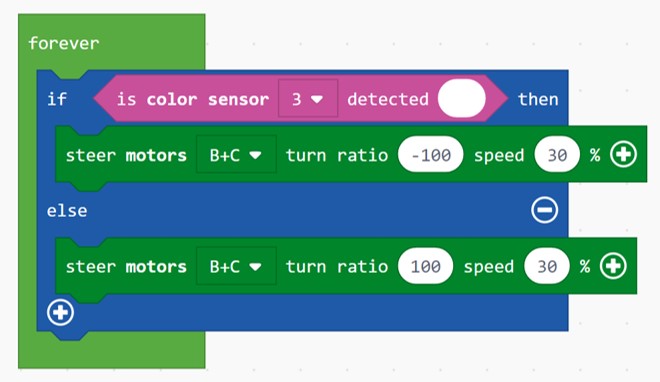
Lluniwch raglen a fydd yn peri i Johnny ddilyn llinell trwy ddefnyddio'r synhwyrydd lliw mowntiedig ar y blaen.
Manylion rhaglennu: Bydd yn dilyn llinell wen. Bydd y synhwyrydd lliw yn union uwchben dechrau'r llinell yn y safle cychwyn.
Sganiwch yn gyson i weld y lliw sy'n cael ei ganfod a chadarnhau mai gwyn ydyw.
Os nad yw'n wyn, rhaid ichi addasu'r cyfeiriad i ganfod y llinell unwaith eto.
Ychwanegwch ddolen wastadol i'w gadw i redeg, gan nad oes diwedd wedi'i osod.
Gall fod o help i adolygu sut gwnaethom symud y robot yn nhaith pedwar gan fod egwyddor debyg yn cael ei defnyddio fan hyn, ond gyda mewnbwn synhwyrwydd gwahanol.
Sut gallem ni ddefnyddio'r seiniau i brofi canfod y llinell yn y rhaglen?
Pam fyddai'r rhaglen hon yn methu pe bawn ni'n cynyddu'r cyflymdra yn ormodol?
Pam fyddai'r rhaglen hon yn methu pe bai'r llinell wen yn cymryd tro tyn iawn i'r chwith?
Pe bai llinell goch dapiedig yn cael ei rhoi ar draws diwedd y llinell wen, sut byddech chi'n newid y rhaglen i stopio fan hyn?
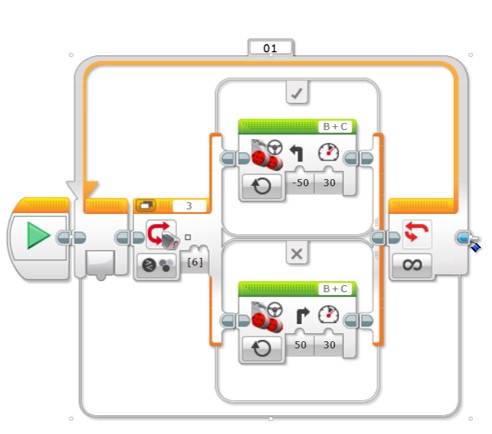
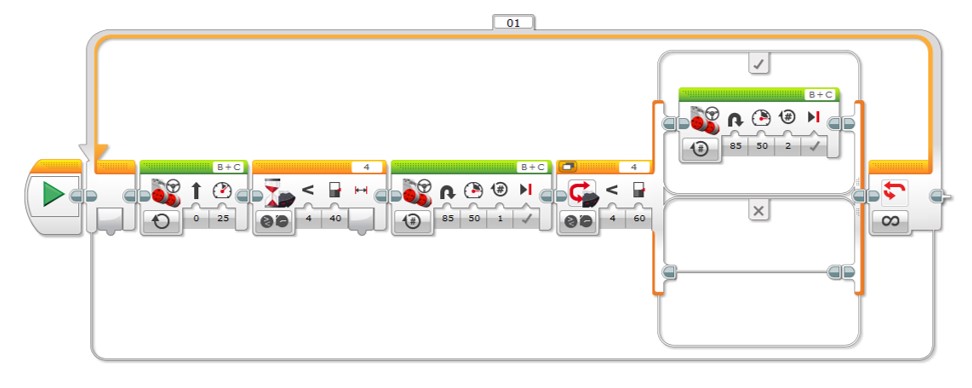
Rhaglennwch Johnny i lywio trwy ddrysfa gan ddefnyddio ei synhwyrydd Isgoch:
Manylion rhaglennu:
Symudwch ymlaen tan i'r synhwyrydd Isgoch ganfod wal
Trowch yn eich unfan 90°
Gwiriwch a oes wal
Os nad oes wal, dylai symud ymlaen ac ailadrodd
Os oes wal yn cael ei chanfod, rhaid iddo droi 180° i'r cyfeiriad arall cyn symud ymlaen ac ailadrodd
Pam na fyddai'r rhaglen hon yn gweithio pe bai pengaeadau (dead-ends) yn y ddrysfa?
Pam byddai'n arfer gwell i ysgrifennu rhaglen nad yw wedi'i chynllunio'n unig ar gyfer llywio trwy'r ddrysfa hon o droeon sgwâr onglog?