Due to other commitments I was unable to travel to Greenland this year, so I spent one wet and windy Saturday in Aberystwyth explaining to Johnny Ryan - who had just arrived to start his PhD - how to operate the UAV's. He was dispatched with a list of instructions and a flight simulator to practice flying model airplanes on the trip to Greenland. I do admit that I didn't really have high expectations of success at that point. However the Fly By Wire modes do make landing and launching a bit easier (and Johnny it turns out is clearly natural pilot). In summary, at least a dozen 40Km+ flights were made and a number of usable datasets obtained. Both airframes were lost in the end, however the limits were being pushed and in both cases we believe the root cause was likely to have been operating mistakes, caused by user interface glitches of the mission planning software combined with less defensive/cautious approaches than I might have employed - learned through years of mistakes!
Achievement
 The headline result was that it was possible to capture high quality digital stills using a Panasonic Lumix DMC-LX5 10.1 megapixel camera with a 24 mm wide-angle lens
at a sufficiently high rate that high resulution DEM's could be constructed, allowing movement and calving of the glacier to be monitored and accurately determined on a frequent basis.
In the future (I'm told) the UAV technology should allow investigation of the effects of large calving events, supraglacial lake drainage or ice mélange breakup on Store Glacier.
My interest is in the UAV and computing technology and I am happy to leave the science applications to others.
For example, to me it is clear that some form of on board adaptive mission planning would be beneficial, since strong and unpredictable winds can exist near the glacier and this could require a mission to abort if there is a danger that the UAV will run out of endurance. Due to the lack of range of low power unlicenced communication technology - particularly in hilly terrain - and the unavailability of GSM in remote areas, the UAV's are completely autonomous; we simply wait for them to return.
The headline result was that it was possible to capture high quality digital stills using a Panasonic Lumix DMC-LX5 10.1 megapixel camera with a 24 mm wide-angle lens
at a sufficiently high rate that high resulution DEM's could be constructed, allowing movement and calving of the glacier to be monitored and accurately determined on a frequent basis.
In the future (I'm told) the UAV technology should allow investigation of the effects of large calving events, supraglacial lake drainage or ice mélange breakup on Store Glacier.
My interest is in the UAV and computing technology and I am happy to leave the science applications to others.
For example, to me it is clear that some form of on board adaptive mission planning would be beneficial, since strong and unpredictable winds can exist near the glacier and this could require a mission to abort if there is a danger that the UAV will run out of endurance. Due to the lack of range of low power unlicenced communication technology - particularly in hilly terrain - and the unavailability of GSM in remote areas, the UAV's are completely autonomous; we simply wait for them to return.
 The top image shows a Digital photograph of the calving front of Store Glacier (Greenland) taken by a time lapse camera at 16:56 on 2nd July 2013
The top image shows a Digital photograph of the calving front of Store Glacier (Greenland) taken by a time lapse camera at 16:56 on 2nd July 2013
The lower image shows a 3D model of Store Glacier produced by Photoscan from photos taken by the autonomous UAV between 16:39 and 17:05 on 2nd July 2013
Mission Planning
A typical mission plan at about 500m altitude. On the right is the plot of the actual GPS data logged for the mission.


Launch
Off on another mission...


On board shots
Here are a couple of the many hundreds of images taken in each flight.






The camera is looking straight down, but when the plane banks we find the occasional image with the horizon included! Click on the images for larger (although not full resolution, for reasons of webspace)
Results
 Agisoft Photoscan is not cheap, but is extremely powerful. It implements the theory that if you have enough two dimensional images of the same 3 dimensional scene taken from different viewpoints it is possible to calculate the 'distance' information missing from the photos. It requires a lot of processing time, and having the GPS positions for each photo helps to reduce the search space considerably, which was why we wrote the GPS position into the flight log (right image) each time the camera was triggered. The result is a 3D surface in the left image which can be textured with data from the original images to produce the 3D model 'B' near the top of the page.
Agisoft Photoscan is not cheap, but is extremely powerful. It implements the theory that if you have enough two dimensional images of the same 3 dimensional scene taken from different viewpoints it is possible to calculate the 'distance' information missing from the photos. It requires a lot of processing time, and having the GPS positions for each photo helps to reduce the search space considerably, which was why we wrote the GPS position into the flight log (right image) each time the camera was triggered. The result is a 3D surface in the left image which can be textured with data from the original images to produce the 3D model 'B' near the top of the page.
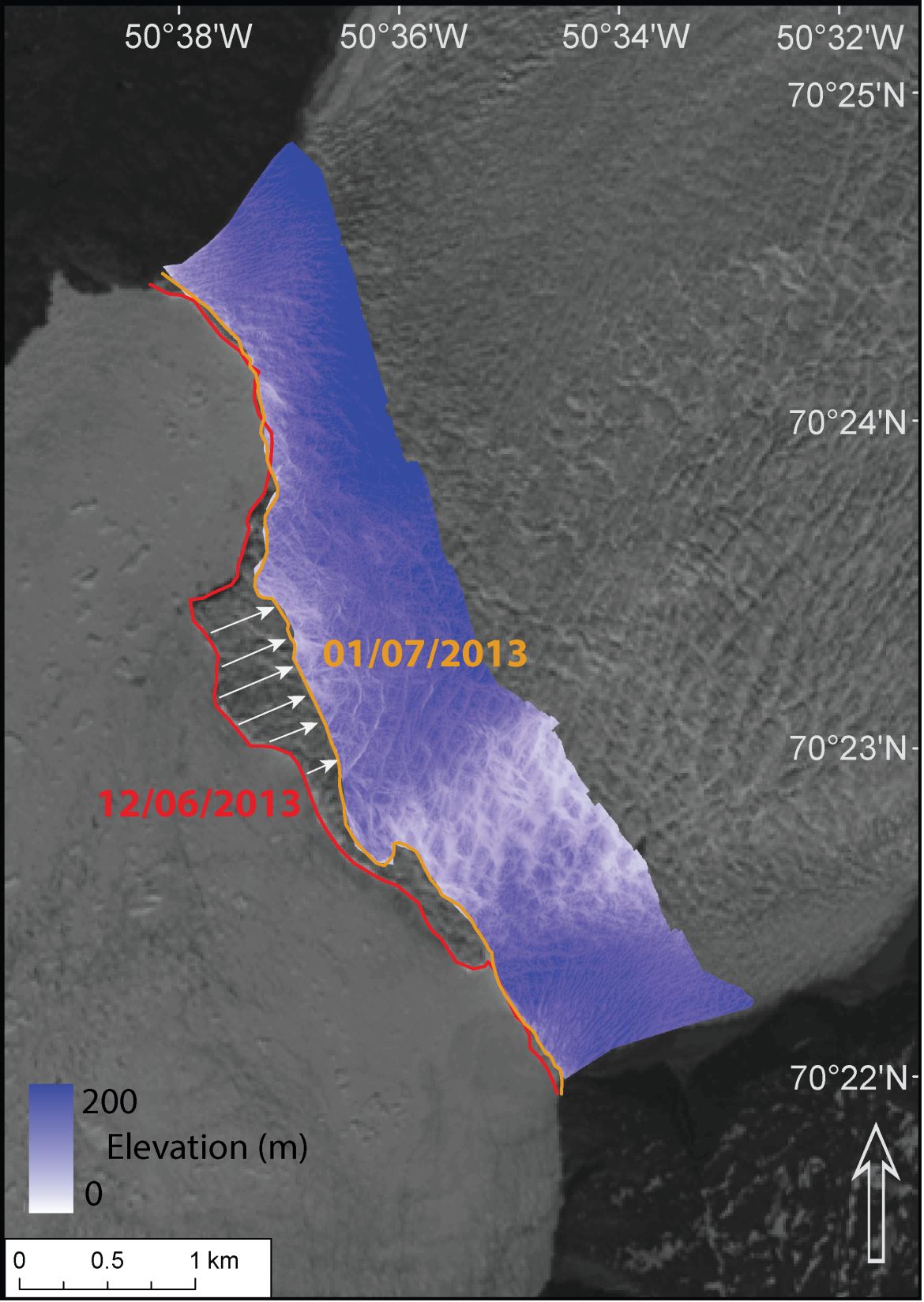
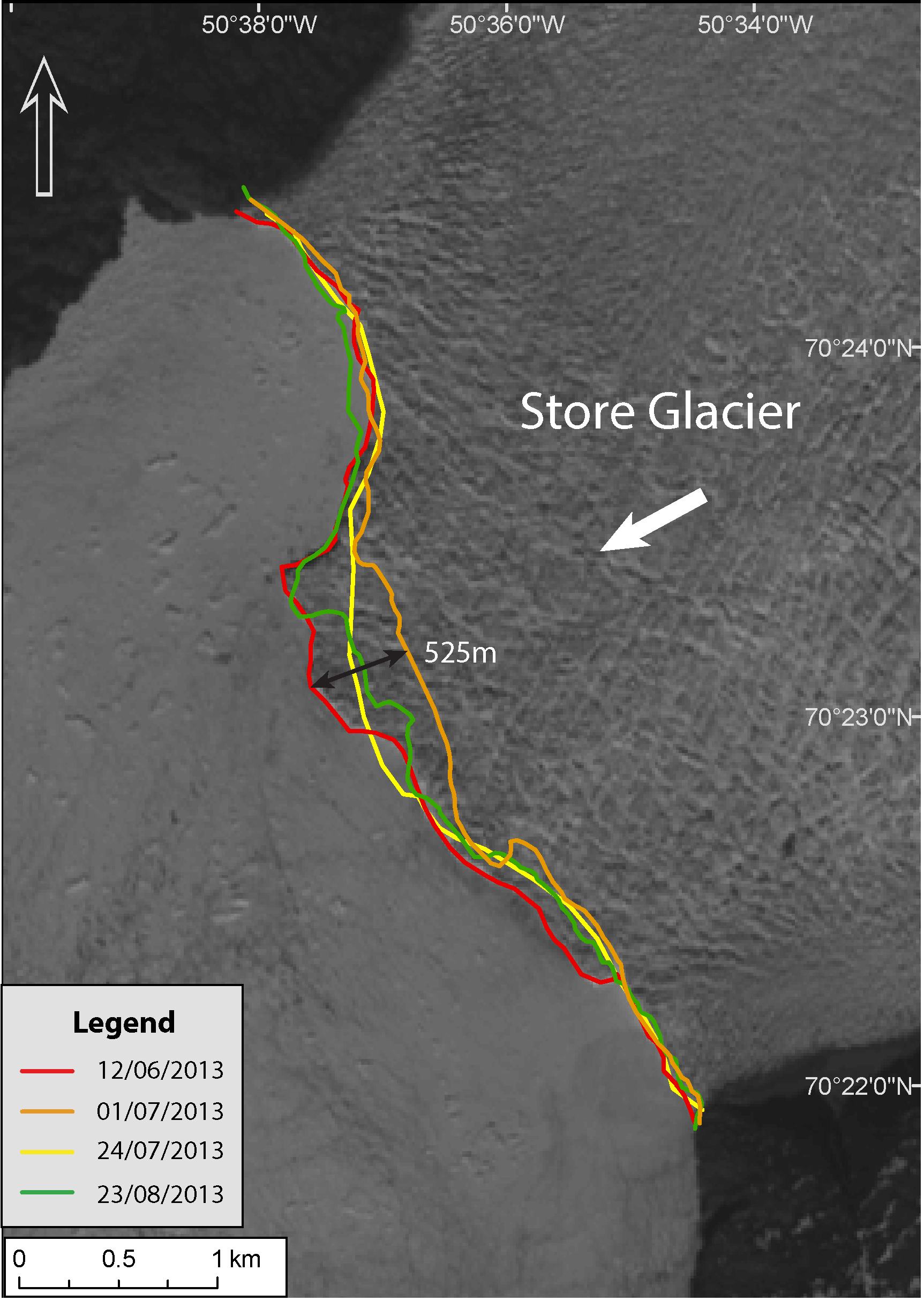
Glacier front position
Sequences of DEM's can be used to show temporal changes.

What happened to the UAV's ?
Well after many happy returns such as the one captured on video below. If you dont see it because your browser doesn't have a plugin to display .mp4 videos, right click on this link and download it to play using your favourate player.
But then one day the orange UAV vanished.
What we believe happened was due to a misunderstanding concerning altitude.
There is a topological flight preview in the mission planner which plots each waypoint on a cross section of the flight plath; unfortunately it draws straight lines between the waypoints which is misleading.
If the black line below represents a simplified view of the end of a mission with launch point on the left and the glacier 7Km away on the right, the mission planner will provide a cross section view of the flight path and ground height as shown by the blue and black lines respectively.
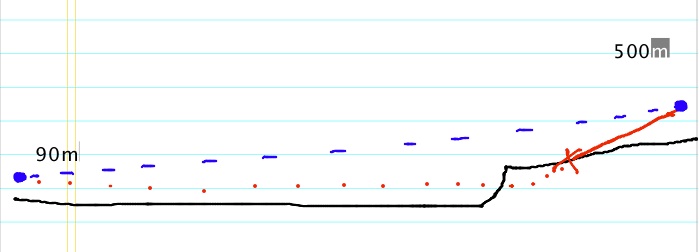
Unfortunately this is not how waypoint altitude works, upon leaving the 500m waypoint the autopilot attempts to attain the altitude of the next waypoint (90m) as quickly as it is allowed (I had programmed this long before in Aberystwyth to 25% decent and 15% ascent, although Johnny and Alun didn't know that). The UAV therefore probably attempted to follow the red path...
Why did this happen after more than a dozen flights? Well apparently the number of waypoints was expanding with more complex missions, and following advice to keep the number of waypoints reasonable (perhaps because someone could see that it gets more difficult to detect errors or duplicates if there are lots) no final 'mission altitude' waypoint was plotted at the end of the mission above the launch point, allowing the autopilot to decend automatically to the RTL (return to launch) altitude of 90m from a distant point over the glacier. Perhaps we should have called it Stardust.
And the second UAV? Well it is not quite so certain what happened to that one. After a number of successful missions it did not return. However Johnny believes he did hear it about the time it was due back. What we think might have happened is that the default altitude was zero causing it to run into the ground(or sea) not that far from the launch site. The problem is that 'default altitude' box on the mission planner software interface has(d) a habbit of returning to zero for no apparent reason (probably a GUI updating glitch of some sort). I was nearly caught by it several times while testing, but had developed a strategy of checking that RTL mode worked correctly as soon as a safe height was reached after launch. This ensures that the GPS lock is good, the home position is correctly stored and the dafault (home loitering) altitude is correct. A couple of times I flicked the switch int RTL and the plane headed toward the ground and had to bail out, land and reprogram. Of course this is easy during testing but in the heat of a mission with all that data to collect such a procedure is harder to remember... Actually the most annoying part is losing the camera, because it was the first time a better more expensive one was fitted. Murphy strikes again.